1.www.google.com
2.www.wikipedia.org
3.www.tecnologiamoderna.com
miércoles, 4 de mayo de 2011
Conclusión
En este blog han aprendido sobre Tecnologia, Hardware,Robotica,etc... espero que les alla gustado o servido.
Intrducción
En este Blog podras encontrar informacion sobre la tecnologia fue creado por Luis Manuel Bordas Durante su periodo de estudio en O&M Hostos School Bueno volviendo al tema del Blog este blog incluye: informacion,fotos,y algunas Definiciones.Espero que les alla interesado.
Conceptos de la Robotica
Es una ciencia o rama de la tecnología, que estudia el diseño y construcción de máquinas capaces de desempeñar tareas realizadas por el ser humano o que requieren del uso de inteligencia. Las ciencias y tecnologías de las que deriva podrían ser: el álgebra, los autómatas programables, las máquinas de estados, la mecánica o la informática.

Clasificacion de Robots
La potencia del software en el controlador determina la utilidad y flexibilidad del robot dentro de las limitantes del diseño mecánico y la capacidad de los sensores. Los robots han sido clasificados de acuerdo a su generación, a su nivel de inteligencia, a su nivel de control, y a su nivel de lenguaje de programación. Éstas clasificaciones reflejan la potencia del software en el controlador, en particular, la sofisticada interacción de los sensores. La generación de un robot se determina por el orden histórico de desarrollos en la robótica. Cinco generaciones son normalmente asignadas a los robots industriales. La tercera generación es utilizada en la industria, la cuarta se desarrolla en los laboratorios de investigación, y la quinta generación es un gran sueño.
1.- Robots Play-back, los cuales regeneran una secuencia de instrucciones grabadas, como un robot utilizado en recubrimiento por spray o soldadura por arco. Estos robots comúnmente tienen un control de lazo abierto.
2.- Robots controlados por sensores, estos tienen un control en lazo cerrado de movimientos manipulados, y hacen decisiones basados en datos obtenidos por sensores.
3.- Robots controlados por visión, donde los robots pueden manipular un objeto al utilizar información desde un sistema de visión.
4.- Robots controlados adaptablemente, donde los robots pueden automáticamente reprogramar sus acciones sobre la base de los datos obtenidos por los sensores.
5.- Robots con inteligencia artificial, donde las robots utilizan las técnicas de inteligencia artificial para hacer sus propias decisiones y resolver problemas.
1.- Robots Play-back, los cuales regeneran una secuencia de instrucciones grabadas, como un robot utilizado en recubrimiento por spray o soldadura por arco. Estos robots comúnmente tienen un control de lazo abierto.
2.- Robots controlados por sensores, estos tienen un control en lazo cerrado de movimientos manipulados, y hacen decisiones basados en datos obtenidos por sensores.
3.- Robots controlados por visión, donde los robots pueden manipular un objeto al utilizar información desde un sistema de visión.
4.- Robots controlados adaptablemente, donde los robots pueden automáticamente reprogramar sus acciones sobre la base de los datos obtenidos por los sensores.
5.- Robots con inteligencia artificial, donde las robots utilizan las técnicas de inteligencia artificial para hacer sus propias decisiones y resolver problemas.
6.-Los robots medicos son , fundamentalmente , protesis para disminuirdos fisicos que se adaptan al cuerpo y estan dotados de potentes sistemas de mando. Con ellos se logra igualar al cuerpo con precision los movimientos y funciones de los organos o extremidades que suplen.
7.-Los androides son robots que se parecen y actúan como seres humanos. Los robots de hoy en día vienen en todas las formas y tamaños, pero a excepción de los que aparecen en las ferias y espectáculos, no se parecen a las personas y por tanto no son androides. Actualmente, los androides reales sólo existen en la imaginación y en las películas de ficción.
8.- Los robots móviles .- Están provistos de patas, ruedas u orugas que los capacitan para desplazarse de acuerdo su programación. Elaboran la información que reciben a través de sus propios sistemas de sensores y se emplean en determinado tipo de instalaciones industriales, sobre todo para el transporte de mercancías en cadenas de producción y almacenes. También se utilizan robots de este tipo para la investigación en lugares de difícil acceso o muy distantes, como es el caso de la exploración espacial y las investigaciones o rescates submarinos.
1.- Dispositivos de manejo manual, controlados por una persona.
2.- Robots de secuencia arreglada.
3.- Robots de secuencia variable, donde un operador puede modificar la secuencia fácilmente.
4.- Robots regeneradores, donde el operador humano conduce el robot a través de la tarea.
5.- Robots de control numérico, donde el operador alimenta la programación del movimiento, hasta que se enseñe manualmente la tarea.
6.- Robots inteligentes, los cuales pueden entender e interactuar con cambios en el medio ambiente.
Los programas en el controlador del robot pueden ser agrupados de acuerdo al nivel de control que realizan.
1.- Nivel de inteligencia artificial, donde el programa aceptará un comando como "levantar el producto" y descomponerlo dentro de una secuencia de comandos de bajo nivel basados en un modelo estratégico de las tareas.
2.- Nivel de modo de control, donde los movimientos del sistema son modelados, para lo que se incluye la interacción dinámica entre los diferentes mecanismos, trayectorias planeadas, y los puntos de asignación seleccionados.
3.- Niveles de servosistemas, donde los actuadores controlan los parámetros de los mecanismos con el uso de una retroalimentación interna de los datos obtenidos por los sensores, y la ruta es modificada sobre la base de los datos que se obtienen de sensores externos. Todas las detecciones de fallas y mecanismos de corrección son implementadas en este nivel.
En la clasificación final se considerara el nivel del lenguaje de programación. La clave para una aplicación efectiva de los robots para una amplia variedad de tareas, es el desarrollo de lenguajes de alto nivel. Existen muchos sistemas de programación de robots, aunque la mayoría del software más avanzado se encuentra en los laboratorios de investigación. Los sistemas de programación de robots caen dentro de tres clases :
1.- Sistemas guiados, en el cual el usuario conduce el robot a través de los movimientos a ser realizados.
2.- Sistemas de programación de nivel-robot, en los cuales el usuario escribe un programa de computadora al especificar el movimiento y el sensado.
3.- Sistemas de programación de nivel-tarea, en el cual el usuario especifica la operación por sus acciones sobre los objetos que el robot manipula.
La Asociación de Robots Japonesa (JIRA) ha clasificado a los robots dentro de seis clases sobre la base de su nivel de inteligencia:  |
Robotica Evolutiva
La Robótica Evolutiva (RE) es un área de la Robótica Autónoma en la que se desarrollan los controladores de los robots mediante la evolución al usar Algoritmos Genéticos.
Habitualmente se evolucionan Redes Neuronales ya que se sigue el referente biológico y simplifica el diseño y la representación en el algoritmo genético.

Habitualmente se evolucionan Redes Neuronales ya que se sigue el referente biológico y simplifica el diseño y la representación en el algoritmo genético.
Cerebro Artificial
Cerebro artificial es un término utilizado habitualmente en los medios de comunicación para describir la investigación que pretende desarrollar software y hardware con habilidades cognitivas similares al cerebro humano o animal.

cibercultura
Cibercultura es la cultura que emerge, o está emergiendo, del uso del computador para la comunicación, el entretenimiento y el mercadeo electrónico. Cultura nacida de la aplicación de las nuevas tecnologías de la información y comunicación como internet. Cultura basada en las ventajas y desventajas de la libertad absoluta, el anonimato,y ciberciudadanos con derechos y obligaciones.

Inteligencia Artificial
La Inteligencia Artificial surge definitivamente a partir de algunos trabajos publicados en la década de 1940 que no tuvieron gran repercusión, pero a partir del influyente trabajo en 1950 de Alan Turing, matemático británico, se abre una nueva disciplina de las ciencias de la información.
Si bien las ideas fundamentales se remontan a la lógica y algoritmos de los griegos, y a las matemáticas de los árabes, varios siglos antes de Cristo, el concepto de obtener razonamiento artificial aparece en el siglo XIV. A finales del siglo XIX se obtienen lógicas formales suficientemente poderosas y a mediados del siglo XX, se obtienen máquinas capaces de hacer uso de tales lógicas y algoritmos de solución.

Si bien las ideas fundamentales se remontan a la lógica y algoritmos de los griegos, y a las matemáticas de los árabes, varios siglos antes de Cristo, el concepto de obtener razonamiento artificial aparece en el siglo XIV. A finales del siglo XIX se obtienen lógicas formales suficientemente poderosas y a mediados del siglo XX, se obtienen máquinas capaces de hacer uso de tales lógicas y algoritmos de solución.
Las Redes Sociales
Historia
1997
En 1997 se creó Sixdegrees, este fue el primer servicio que permitió crear un perfil en la web, agrupar a los contactos directos e intercambiar mensajes con ellos.
En el 2005 nace Yahoo 360, la red social de esta empresa que cuenta con servicio de correo, calendario, fotos, eventos, blog y música. En el 2005 también nace Bebo, una red muy básica con el fin de contactar amigos e intercambiar multimedia.
Importancias:
En la actualidad las redes sociales tienen más vigencia que nunca si las tomamos como soportes o sostenes sociales para las personas que conviven en una comunidad dada.
Con el advenimiento de la modernidad y la cultura del individualismo basado muchas veces en el capitalismo; es decir, en lo que obliga el sistema capitalista en frecuentemente en cuanto al “sálvese quien pueda” o el “pisar al que tengo delante mío para prevalecer” o la “cultura del más fuerte”, que vemos por ejemplo en los documentales de animales donde se intenta trasmitir el mensaje de que los humanos actuamos “naturalmente” de alguna forma igual que los animales que se devoran unos a otros prevaleciendo el más fuerte por encima de los más débiles.
Sin embargo, al igual que los animales o algunos de ellos, el hombre ha creado desde sus orígenes sistemas de convivencia basados en el grupo y en la comunidad y hoy más que nunca la composición de los tejidos sociales pasa a ser uno de los desafíos más importantes para recomponer a la sociedad misma.
La red social la podemos definir como el conjunto de personas integrantes de una comunidad que tienen un sentido subjetivo de pertenencia hacia la misma y que mediante acciones organizadas específicas se desarrolla un tejido o red en el que se actúa en pro del bienestar de esa comunidad y por lo tanto de las personas que la integran, actuando como un soporte y ámbito donde se resuelven los problemas.
Desventajas:
De la misma forma en que los clientes contentos escriben buenos comentarios de un producto, los clientes molestos también escribirán acerca de su mala experiencia. Estos comentarios pueden ser vistos por miles de personas en poco tiempo y afectar la imagen de cualquier empresa en semanas o incluso días. ¿Cómo protegernos en este tipo de situación? Afrontarlo con Honestidad. Muchos Blogs corporativos eliminan los malos comentarios de sus Blogs, creando desconfianza entre los consumidores.
En Internet tenemos las herramientas para poder hacer aclaraciones, proponer alternativas y si es necesario ofrecer disculpas. Si una empresa sabe utilizar adecuadamente la retroalimentación (buena o mala) de sus clientes, contesta sus dudas y comentarios con honestidad, los resultados positivos se darán tarde o temprano.
Otra desventaja es la pérdida de la privacidad. De pronto nos volvemos accesibles a cualquier persona y no siempre es bueno. Hay que evitar revelar información sensible cómo teléfonos, direcciones y ni hablar de cuentas bancarias y passwords.
Ejemplos de redes sociales:


1997
En 1997 se creó Sixdegrees, este fue el primer servicio que permitió crear un perfil en la web, agrupar a los contactos directos e intercambiar mensajes con ellos.
1999
Para 1999 se creó LiveJournal.com, este fue uno de los primeros servicios de redes sociales en ofrecer blogs y diarios en línea.2001
En el 2001 apareció Ryce.com, y nació con ella la primera red social especializada. En la actualidad ésta agrupa por lo menos a 500 mil profesionales.2002
En el 2002 nace Friendster que fue la primera en tener un sistema inteligente capaz de relacionar a los usuarios de la red según sus gustos. También en este año nace Fotolog, la primera red social que nace con el fin de intercambiar fotografías. Last FM nace en el 2002, en principio con el objetivo de ser una emisora en línea, pero con el tiempo se convierte en una red social movida por el interés en la música.2003
En el 2003 se crea linkedin, una red social con el fin de propiciar las relaciones empresariales. También nace My Space, tal vez la red más grande del momento agrupando a más de 250 millones de usuarios. En ese mismo año nace MSN Spaces llamado hoy Windows Live Spaces, que tiene 100 millones de visitantes únicos al mes. En Colombia hay 1.5 millones de usuarios de esta red. También en el 2003 nace Hi5 que, hoy por hoy, tiene 50 millones de cuentas activas.2004
Flickr nace en el 2004 como una red social que funciona a través del servicio de compartir fotografías. En este año también nace Orkut, la red social de Google con gran popularidad en Brasil y La India Facebook, la sensación del momento nace en el 2004, con nuevas actualizaciones como el muro, donde puedes colgar fotos en tu perfil y comentar, 500 millones de miembros, y traducciones a 70 idiomas. 2005En el 2005 nace Yahoo 360, la red social de esta empresa que cuenta con servicio de correo, calendario, fotos, eventos, blog y música. En el 2005 también nace Bebo, una red muy básica con el fin de contactar amigos e intercambiar multimedia.
2006
En el 2006, nació Xing, con el fin de agrupar ejecutivos permitiéndoles compartir datos, crear agendas conjuntas y construir discusiones en torno a un tema común.2010
En el 2010 nació I-rooms.net, una red social de Panamá que combina las características de un portal con las funciones típicas de otras redes sociales (subir fotos, videos, música, agregar amigos, etc) Muy parecida a Myspace, la misma esta desarrollada bajo la plataforma Ning con integración de joomla y páginas en html. Según sus creadores su objetivo principal es "brindar a los usuarios una forma diferente de promoción y búsqueda de información"2011
En el 2011 nace www.blaving.com "la red social de la voz" es un microblog que permite comunicarnos con mensajes de voz cortos, de 2 minutos o menos, la interfaz es muy sencilla de comprender.Importancias:
En la actualidad las redes sociales tienen más vigencia que nunca si las tomamos como soportes o sostenes sociales para las personas que conviven en una comunidad dada.
Con el advenimiento de la modernidad y la cultura del individualismo basado muchas veces en el capitalismo; es decir, en lo que obliga el sistema capitalista en frecuentemente en cuanto al “sálvese quien pueda” o el “pisar al que tengo delante mío para prevalecer” o la “cultura del más fuerte”, que vemos por ejemplo en los documentales de animales donde se intenta trasmitir el mensaje de que los humanos actuamos “naturalmente” de alguna forma igual que los animales que se devoran unos a otros prevaleciendo el más fuerte por encima de los más débiles.
Sin embargo, al igual que los animales o algunos de ellos, el hombre ha creado desde sus orígenes sistemas de convivencia basados en el grupo y en la comunidad y hoy más que nunca la composición de los tejidos sociales pasa a ser uno de los desafíos más importantes para recomponer a la sociedad misma.
La red social la podemos definir como el conjunto de personas integrantes de una comunidad que tienen un sentido subjetivo de pertenencia hacia la misma y que mediante acciones organizadas específicas se desarrolla un tejido o red en el que se actúa en pro del bienestar de esa comunidad y por lo tanto de las personas que la integran, actuando como un soporte y ámbito donde se resuelven los problemas.
Desventajas:
De la misma forma en que los clientes contentos escriben buenos comentarios de un producto, los clientes molestos también escribirán acerca de su mala experiencia. Estos comentarios pueden ser vistos por miles de personas en poco tiempo y afectar la imagen de cualquier empresa en semanas o incluso días. ¿Cómo protegernos en este tipo de situación? Afrontarlo con Honestidad. Muchos Blogs corporativos eliminan los malos comentarios de sus Blogs, creando desconfianza entre los consumidores.
En Internet tenemos las herramientas para poder hacer aclaraciones, proponer alternativas y si es necesario ofrecer disculpas. Si una empresa sabe utilizar adecuadamente la retroalimentación (buena o mala) de sus clientes, contesta sus dudas y comentarios con honestidad, los resultados positivos se darán tarde o temprano.
Otra desventaja es la pérdida de la privacidad. De pronto nos volvemos accesibles a cualquier persona y no siempre es bueno. Hay que evitar revelar información sensible cómo teléfonos, direcciones y ni hablar de cuentas bancarias y passwords.
Ejemplos de redes sociales:
Fordismo
El término fordismo se refiere al modo de producción en cadena que llevó a la práctica Henry Ford; fabricante de automóviles de Estados Unidos. Este sistema comenzó con la producción del Ford Modelo T, -a partir de 1908- con una combinación y organización general del trabajo altamente especializada y reglamentada a través de cadenas de montaje, maquinaria especializada, salarios más elevados y un número elevado de trabajadores en plantilla y fue utilizado posteriormente en forma extensiva en la industria de numerosos países, hasta la década de los 70 del siglo XX (cuando fue reemplazada por el Toyotismo). El fordismo como modelo de producción resulta rentable siempre que el producto pueda venderse a un precio relativamente bajo en relación a los salarios promedio, generalmente en una economía desarrollada.

Taylorismo
El taylorismo, denominado así por el estadounidense Frederick Winslow Taylor, y relativo a la organización del trabajo, se refiere a la división de las distintas tareas del proceso de producción. Este fue un nuevo método de organización industrial, cuyo fin era aumentar la productividad y evitar el control que el obrero podía tener en los tiempos de producción.


Toyotismo
El toyotismo corresponde a una relación en el entorno de la producción industrial que fue pilar importante en el sistema de procedimiento industrial japonés y coreano, y que después de la crisis del petróleo de 1973 comenzó a desplazar al fordismo como modelo referencial en la producción en cadena. Se destaca de su antecesor básicamente en su idea de trabajo flexible, aumento de la productividad a través de la gestión y organización (just in time) y el trabajo combinado que supera a la mecanización e individualización del trabajador, elemento característico del proceso de la cadena fordista.

La Tecnologia y el Medio Ambiente
LA TECNOLOGIA Y EL MEDIO AMBIENTE
Impacto ambiental de la tecnología
Desde los tiempos prehistóricos las personas han obtenido recursos para cazar, protegerse, etc., de la naturaleza. La naturaleza es capaz de renovar muchos recursos naturales si se consumen a un ritmo adecuado, pero otros recursos no pueden renovarse. Por ejemplo, el petróleo y el carbón tardan en formarse millones de años. Sin embargo, desde la época de la Revolución Industrial, las personas hemos consumido la mayor parte de las reservas mundiales de estos combustibles fósiles.
Durante mucho tiempo las necesidades industriales y tecnológicas se han satisfecho sin prestar atención a los posibles daños causados al medio ambiente. Ahora parece que al menos se conocen estos daños; sólo falta poner los medios a nuestro alcance para evitarlos.

Problemas medioambientales provocados por las actividades tecnológicas
Las actividades humanas, desde la obtención de una materia prima, hasta el desecho de los residuos generados tras la obtención de un producto tecnológico, pueden tener consecuencias nefastas para la conservación del medio ambiente. Algunos ejemplos son la desertización, el impacto medioambiental de las obras tecnológicas, la contaminación producida en la obtención y tratamiento de muchas materias primas o de fuentes de energía y los residuos generados en muchas actividades industriales.
Impacto ambiental directo. La ejecución de obras públicas (carreteras, pantanos, etc.) y las explotaciones mineras modifican el ecosistema en el que habitan muchas especies animales y vegetales. Estas obras pueden separar las poblaciones de ambos lados de la carretera, vía férrea, etc.
Desertización. Cada año aumenta la superficie desértica del planeta. Esto da lugar a un empobrecimiento general del suelo, lo que perjudica las actividades agrícolas y ganaderas de la región afectada.
Contaminación. Quizá sea el efecto más apreciable. El incremento en el consumo de energía ha hecho que aumenten considerablemente las proporciones de determinados gases (dióxido de carbono, óxidos de azufre, etc.) en la atmósfera, sobre todo cerca de las áreas industrializadas. Algunas consecuencias de la contaminación del aire son el calentamiento global del planeta debido al efecto invernadero o la disminución en el grosor de la capa de ozono.
Generación de residuos. Determinadas actividades tecnológicas generan residuos muy
contaminantes que resultan difíciles de eliminar, como algunos materiales plásticos o los residuos nucleares.

Impacto ambiental de la tecnología
Desde los tiempos prehistóricos las personas han obtenido recursos para cazar, protegerse, etc., de la naturaleza. La naturaleza es capaz de renovar muchos recursos naturales si se consumen a un ritmo adecuado, pero otros recursos no pueden renovarse. Por ejemplo, el petróleo y el carbón tardan en formarse millones de años. Sin embargo, desde la época de la Revolución Industrial, las personas hemos consumido la mayor parte de las reservas mundiales de estos combustibles fósiles.
Durante mucho tiempo las necesidades industriales y tecnológicas se han satisfecho sin prestar atención a los posibles daños causados al medio ambiente. Ahora parece que al menos se conocen estos daños; sólo falta poner los medios a nuestro alcance para evitarlos.
Problemas medioambientales provocados por las actividades tecnológicas
Las actividades humanas, desde la obtención de una materia prima, hasta el desecho de los residuos generados tras la obtención de un producto tecnológico, pueden tener consecuencias nefastas para la conservación del medio ambiente. Algunos ejemplos son la desertización, el impacto medioambiental de las obras tecnológicas, la contaminación producida en la obtención y tratamiento de muchas materias primas o de fuentes de energía y los residuos generados en muchas actividades industriales.
Impacto ambiental directo. La ejecución de obras públicas (carreteras, pantanos, etc.) y las explotaciones mineras modifican el ecosistema en el que habitan muchas especies animales y vegetales. Estas obras pueden separar las poblaciones de ambos lados de la carretera, vía férrea, etc.
Desertización. Cada año aumenta la superficie desértica del planeta. Esto da lugar a un empobrecimiento general del suelo, lo que perjudica las actividades agrícolas y ganaderas de la región afectada.
Contaminación. Quizá sea el efecto más apreciable. El incremento en el consumo de energía ha hecho que aumenten considerablemente las proporciones de determinados gases (dióxido de carbono, óxidos de azufre, etc.) en la atmósfera, sobre todo cerca de las áreas industrializadas. Algunas consecuencias de la contaminación del aire son el calentamiento global del planeta debido al efecto invernadero o la disminución en el grosor de la capa de ozono.
Generación de residuos. Determinadas actividades tecnológicas generan residuos muy
contaminantes que resultan difíciles de eliminar, como algunos materiales plásticos o los residuos nucleares.
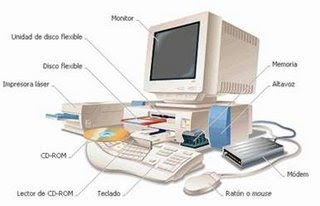
hardwares externos
Es la parte física de un computador y más ampliamente de cualquier dispositivo electrónico. El término proviene del inglés[1] y es definido por la RAE como el conjunto de elementos materiales que conforman una computadora [2] , sin embargo, es usual que sea utilizado en una forma más amplia, generalmente para describir componentes físicos de una tecnología, así el hardware puede ser de un equipo militar importante, un equipo electrónico, un equipo informático o un robot. En informática también se aplica a los periféricos de una computadora tales como el disco duro, CD-ROM, disquetera, etc...
hardwares internos
HARDWARE INTERNO
Procesador
Es el chip más importante de la tarjeta madre, es el que se encarga de organizar el funcionamiento del computador, procesar la información, ejecutar cálculos y en general realizar millones de instrucciones por segundos y esto es lo que define sus características y precio.
Este chip actúa como calculador y ordenador a otros componentes. Al procesador se le dan varios nombres: procesasdor principal, corazón del sistema, y CPU.
Es el chip más importante de la tarjeta madre, es el que se encarga de organizar el funcionamiento del computador, procesar la información, ejecutar cálculos y en general realizar millones de instrucciones por segundos y esto es lo que define sus características y precio.
Este chip actúa como calculador y ordenador a otros componentes. Al procesador se le dan varios nombres: procesasdor principal, corazón del sistema, y CPU.

Inventos e Inventores
Telefono:Alexander Bell
Pila Electrica:Alejandro volta
Bombilla: Tomas Edison
Rayos X: Wilhelm Conrad Roentgen
El telégrafo : Samuel Morse


Pila Electrica:Alejandro volta
Bombilla: Tomas Edison
Rayos X: Wilhelm Conrad Roentgen
El telégrafo : Samuel Morse
Suscribirse a:
Comentarios (Atom)